
Mithilfe von OpenWRT befreien Sie den knuffigen kleinen Router TP-Link TL-MR3020 von seiner proprietären Firmware und bauen ihn zum Allround-Server fürs heimische Netz um.
Die Firma TP-Link [1] aus China produziert Router verschiedenster Leistungsklassen. Den TL-MR3020 (Abbildung 1) vermarktet der Hersteller als “Mobile Router”, da er klein und leicht ist. Allerdings unterstützt er kein 3G (siehe Kasten “Die Hardware”), das lässt sich aber über den USB-Port nachrüsten.
Attraktiv ist der Router also vor allem für jene, die kein 3G brauchen oder sowieso schon einen UMTS-Stick haben und deshalb nicht in einen teuren UMTS-Mobile-Router investieren wollen. Hier soll aber nicht die “normale” Nutzung des Routers im Mittelpunkt stehen, sondern dessen Ausbau zu einem Mini-Server.
Dazu ersetzen wir die vorhandene Firmware durch OpenWRT [2], eine auf Kleinstgeräte spezialisierte Linux-Distribution. OpenWRT besitzt ein Paketmanagementsystem, das jenem der klassischen Distributionen in Nichts nachsteht, und so stehen den eigenen Vorstellungen nur die Grenzen der Hardware entgegen.
Die Hardware
Der TL-MR3020 ist ein kleines weißes Plastikkästchen (Abbildung 1) mit den Abmessungen 7,4 x 6,7 x 2,2 Zentimeter und einem Gewicht von nur 60 Gramm. Ein Mini-USB-Stecker dient der Stromversorgung, das beiliegende Netzteil liefert 1 Watt. Der Router funktioniert aber problemlos auch an einem USB-Port. Außerdem bringt der TL-MR3020 einen USB-2.0- und einen RJ45-Ethernet-Port (100 Mbit/s) mit. TP-Link liefert für Letzteren ein kurzes, flaches Patchkabel mit. Auf WLAN-Seite beherrscht der kleine Router IEEE 802.11b/g/n mit bis zu 150 Mbit/s.
Seinen Status signalisiert der TL-MR3020 über fünf LEDs, von denen sich vier programmieren lassen. Daneben gibt es einen für die WLAN-Einrichtung per WPS gedachten Taster sowie einen Schiebeschalter mit drei Positionen (3G/WISP/AP). Im Inneren des Routers werkelt eine mit 400 MHz getaktete ARM-CPU, der 32 MByte RAM zur Verfügung stehen. Das Betriebssystem residiert auf einem 4 MByte großen Flash-Chip. Der USB-Anschluss dient mit der originalen Firmware für den Anschluss eines UMTS-Sticks und den Betrieb als mobiler 3G-Router. Ohne Stick arbeitet das Gerät als WLAN-Access-Point.
Als nützlicher Zusatz zum TL-MR3020 empfiehlt sich ein Mini-USB-Hub von Pearl (Abbildung 1, rechts). Dieser integriert einen Micro-SDHC-Reader und stellt so auf einer Speicherkarte das im Artikel beschriebene erweiterte Root-Dateisystem bereit, ohne den USB-Port zu blockieren.
Die Platine des Routers enthält weitere Anschlüsse, die TP-Link aber nicht herausführt. Wer mit dem Lötkolben umgehen kann, nutzt weitere Komponenten wie eine serielle Konsole, eine I2C-Schnittstelle oder eine externe Antenne. Das OpenWRT-Wiki zeigt dazu auf seinen Seiten zum TL-MR3020 [3] einige Bilder und verlinkt zu entsprechenden Anleitungen.

Abbildung 1: Der TL-MR3020 von TP-Link (links) ist nicht größer als ein Handteller. Der Mini-USB-Hub von Pearl rechts daneben dient Erweiterungszwecken.
Auftakt
Der TL-MR3020 eignet sich aus zwei Gründen für unsere Zwecke gut: Einerseits kostet er mit 30 Euro nicht die Welt – falls Sie ihn einmal “bricken”, dann tut das dem Geldbeutel nicht zu sehr weh. Andererseits baut der Hersteller keinerlei Hindernisse ein, welche die Installation einer fremden Firmware verhindern.
Laden Sie also die passende OpenWRT-Version herunter [3] und verbinden Sie sich gemäß der knappen, doch ausreichenden Anleitung des Routers mit der Weboberfläche des Geräts. Dort laden Sie die neue neue Firmware per Upload im Webformular auf den TL-MR3020 (Abbildung 2).

Abbildung 2: OpenWRT laden Sie als Firmware-Update über die originale Weboberfläche auf den TL-MR3020.
Dabei handelt es sich um den einzigen wirklich kritischen Schritt bei der ganzen Sache. Ein fehlerhaftes Firmware-Image sendet den Router ins Nirvana – nur wer löten kann, hat noch eine Chance. Lesen Sie deshalb vor dem Einspielen unbedingt noch einmal die einschlägigen Artikel im OpenWRT-Wiki [3] durch und beachten Sie die entsprechenden Hinweise.
Nach der Installation von OpenWRT steht zunächst die Basiskonfiguration an, insbesondere des Netzwerks. Als nächstes kommt das Einrichten einer Reihe von Softwarepaketen, welche die USB-Unterstützung von Datenspeichern (USB-Sticks oder Festplatten) nachrüsten. Dadurch kann der Router dann von einem externen Datenträger starten. Auf dem so erweiterten Root-Dateisystem landen dann weitere Softwarepakete aus dem OpenWRT-Repository für den eigentlichen Anwendungszweck.
Erster Kontakt
Nach dem Firmware-Upgrade und dem Neustart des Geräts verbinden Sie Ihren PC oder Laptop per Kabel mit dem Router, konfigurieren das Netzwerk (normalerweise sorgt der Netzwerkmanager dafür) und melden sich per Telnet auf der Adresse 192.168.1.1 an (auf dem Router läuft ein DHCP-Server, der den PC oder Laptop mit einer geeigneten Adresse versorgt).
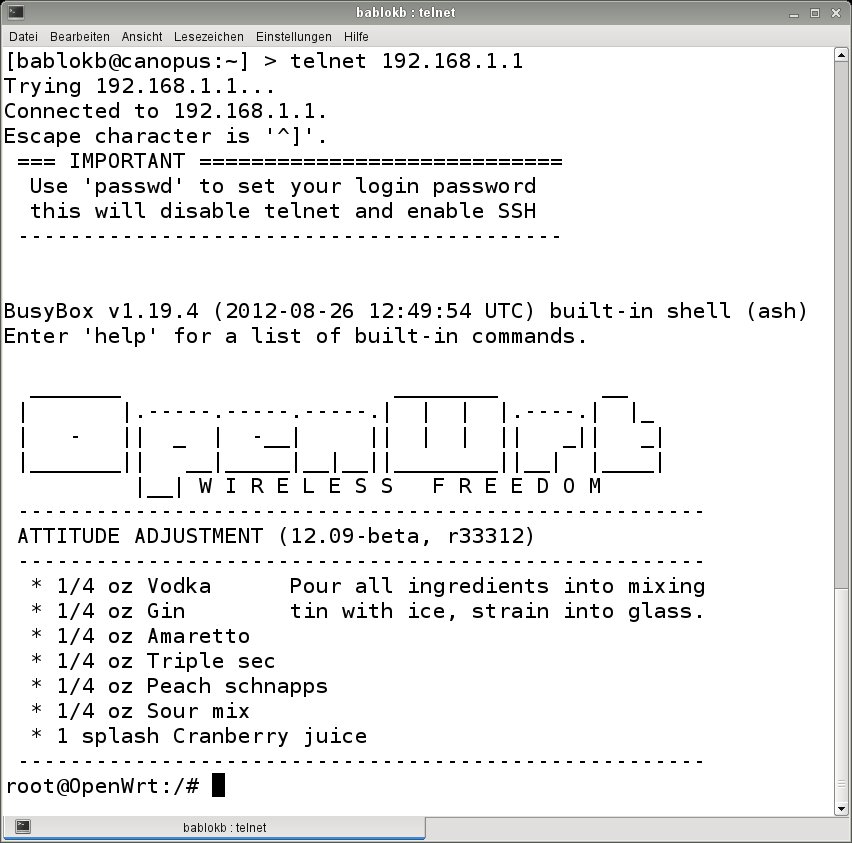
Abbildung 3: Geschafft: Die erste Anmeldung an OpenWRT steht an.
An dieser Stelle setzen Sie ein Passwort für root. OpenWRT schaltet dann aus Sicherheitsgründen den Telnet-Server ab und fährt den SSH-Server hoch. Als nächstes passen Sie die Netzwerkkonfiguration so an, dass der Router im heimischen Netzwerk arbeitet, anschließend kommt zusätzliche Software auf den Rechner. Details zum Konfigurationssystem von OpenWRT lesen Sie im Kasten “OpenWRT konfigurieren” nach.
Da wir den Router als Server im Heimnetz nutzen wollen, sieht die Netzwerkkonfiguration so aus wie in Listing 1 (/etc/config/network) und Listing 2 (/etc/config/wireless) gezeigt. Die Zeilen 9 bis 15 von Listing 1 konfigurieren das WLAN-Interface. In Listing 2 sorgt die Zeile 19 dafür, dass der Server sich als WLAN-Client ins Netz integriert, nicht etwa als Access-Point beziehungsweise Router.
Nach einem beherzten Neustart findet sich das Gerät (hoffentlich) unter der konfigurierten Netzwerkadresse. Falls nicht, hilft der Notfall-Modus: Während des Bootens drücken Sie die WPS-Taste, sobald diese anfängt zu blinken. Wenn die LED-Lampe schneller blinkt, dann lassen Sie sie wieder los. Jetzt befindet sich das Gerät im sogenannten Failsafe-Modus, auf der vorgegebenen Adresse 192.168.1.1 läuft jetzt der Telnet-Daemon. Mit dem verbinden Sie sich und nehmen die notwendigen Korrekturen vor. Allerdings steht in diesem Modus auf dem Router kein DHCP-Server zur Verfügung: Sie müssen Ihrem eigenen Rechner per Hand eine passende IP-Adresse zuweisen.
Listing 1
# /etc/config/network -----------------
config interface 'loopback'
option ifname 'lo'
option proto 'static'
option ipaddr '127.0.0.1'
option netmask '255.0.0.0'
config interface 'wifi'
option proto 'static'
option ipaddr '192.168.3.100'
option netmask '255.255.255.0'
option gateway '192.168.3.1'
list dns '192.168.3.1'
list dns '8.8.8.8'
Listing 2
# /etc/config/wireless ---------------
config wifi-device radio0
option type mac80211
option channel 11
option macaddr 90:f6:52:e6:d7:b2
option hwmode 11ng
option htmode HT20
list ht_capab SHORT-GI-20
list ht_capab SHORT-GI-40
list ht_capab RX-STBC1
list ht_capab DSSS_CCK-40
# REMOVE THIS LINE TO ENABLE WIFI:
# option disabled 1
config wifi-iface
option device radio0
option network wifi
option mode sta
option ssid 'meine-ssid'
option encryption psk2
option key 'geheim'
OpenWRT konfigurieren
Das Konfigurationsystem von OpenWRT ist über alle systemnahen Pakete hinweg sehr konsistent gehalten. Alle Konfigurationsdateien liegen unter /etc/config. Es handelt sich um einfach strukturierte Klartextdateien, die Sie am schnellsten per Editor ändern.
Für den späteren produktiven Betrieb des Routers eignet sich das Webinterface als Alternative zum Editor: Hier passen Sie bequem einzelne Konfigurationsparameter an und fragen den Systemstatus ab (Abbildung 4). Eine weitere Alternative bietet eine Schnittstelle für die Kommandozeile. Der Befehl:
$ uci get system.slider.handler
liest den Wert der Option handler des Abschnitts slider aus der Datei /etc/config/system. Für Skripte stellt die Bibliothek /lib/functions.sh ein paar Utilities bereit, die den Umgang mit Einstellungen deutlich erleichtern.

Abbildung 4: Über die Weboberfläche von OpenWRT lassen sich auch Konfigurationsdaten abfragen.
Mehr Software
Das ursprüngliche Firmware-Image enthält nicht alle Komponenten, die für den Betrieb eines Root-Dateisystems auf USB-Stick notwendig sind. Hier gilt es nachzurüsten. Dank die erfolgreich absolvierten Netzwerkkonfiguration kommt der Mini-Router bereits ins Internet, und über das komfortablen Paketmanagementsystem bereit das Nachinstallieren von Software keine Probleme.
Dreh- und Angelpunkt ist das Kommando opkg, das Sie als root ausführen. Mit dem Aufruf opkg update aktualisieren Sie zuerst einmal die Paketliste. Anschließend installieren Sie die angegebenen Pakete mit dem Kommando
# opkg install Paket ...
Suchen Sie etwas Bestimmtes, hilft das Subkommando list, das eine Paketliste samt Kurzbeschreibungen auswirft.
Für die USB-Installation benötigen Sie in erster Linie eine Reihe von Kernelpaketen (Listing 3). Den USB-Stick (im Listing /dev/sdb – das müssen Sie gegebenenfalls anpassen) partitionieren und formatieren Sie am besten an Ihrem PC. Nützlich ist neben einer Root-Partition noch eine Home-Partition und vor allem Swap-Space.
Listing 3
# Root-Dateisystem auf USB-Stick einrichten # Basis USB-support (USB 1.1 and USB 2) opkg update opkg install kmod-usb-uhci kmod-usb-ohci kmod-usb2 insmod uhci insmod usb-ohci insmod usbcore insmod ehci-hcd # USB-Storage (FAT benötigt zusätzliche Module, # das kann man aber später nachrüsten opkg install kmod-usb-storage block-mount kmod-fs-ext4 kmod-scsci-core # USB-Stick vorbereiten (auf dem PC) # -> Partitionieren mit drei Partitionen (root,home,swap) # fdisk /dev/sdb usw. # -> Partitionen mit ext4 bzw. swap formatieren # mkfs.ext4 /dev/sdb1 # mkfs.ext4 /dev/sdb2 # mkswap /dev/sdb3 # Root auf USB vorbereiten (kopiert altes Root-Dateisystem) mkdir -p /mnt/usb mount /dev/sda1 /mnt/usb tar -cvf - -C /overlay . | tar -xf - -C /mnt/usb umount /mnt/usb
Danach stöpseln Sie den Stick an den Router an und ändern die Konfiguration der Mountpoints in der Datei /etc/config/fstab. Wichtig sind hier die Zeilen 10 bis 16 aus Listing 4. Die letzten Zeilen von Listing 3 kopieren das gesamte Root-Dateisystem auf den Stick. Hier lohnt es sich, gleich ein Backup anzulegen. Das System bootet übrigens auch ohne den eingesteckten Stick: In diesem Fall ignoriert es einfach die nicht vorhandenen Devices.
Listing 4
# Mountpoints konfigurieren config global automount option from_fstab 1 option anon_mount 1 config global autoswap option from_fstab 1 option anon_swap 0 config mount option target /overlay option device /dev/sda1 option fstype ext4 option options rw,sync option enabled 1 option enabled_fsck 0 config mount option target /home option device /dev/sda2 option fstype ext4 option options rw,sync option enabled 1 option enabled_fsck 1 config swap option device /dev/sda3 option enabled 1
Nach einem Reboot mit angeschlossenem Stick steht endlich mehr Plattenplatz bereit. Zusätzlich installierte Pakete landen jetzt direkt dort. Insgesamt ist das Root-Dateisystem auf einem USB-Device sehr praktisch: Es erlaubt einerseits die Konfiguration mit den gewohnten Editoren an einem PC, und auch das Hin- und Herkopieren von Daten (zum Beispiel für Backups) fällt leicht.
An dieser Stelle ist die Basiskonfiguration bis auf ein paar Kleinigkeiten (etwa den Hostnamen) erledigt. Das weitere Vorgehen hängt vom Einsatzzweck des Routers ab. Via Paketmanagement holen Sie sich die benötigte Software und konfigurieren diese. Das Vorgehen unter OpenWRT unterscheidet sich dabei nicht von jenem unter anderen Distributionen.
Knöpfe und LEDs
Den TL-MR3020 als Mini-Server können Sie vollständig per Secure Shell oder Webinterface steuern. Einfacher geht es aber über die vorhandenen Buttons. Der ursprüngliche WPS-Taster eignet sich dabei zum Auslösen einzelner Aktionen, während der Schiebeschalter an der Seite mit seinen drei Positionen das Umschalten zwischen verschiedenen Betriebszuständen übernimmt. Dazu weiter unten mehr.
Die LEDs dienen dabei quasi als Ausgabegerät. Hier sind drei unterschiedliche Zustände möglich: An, aus oder blinkend. In Kombination mit den Buttons kann man hier nette Features bauen. Technisch gesehen steuert man die LEDs über Dateien unterhalb von /sys/class/leds, für die WPS-LED ist dies etwa das Verzeichnis /sys/class/leds/tp-link:green:wps. Die Macher von OpenWRT haben aber die gesamte Komplexität gekapselt, Sie müssen im Normalfall nur noch die Konfiguration in der Datei /etc/config/system anpassen (Listing 5, Zeilen 13 bis 35).
Listing 5
# Konfiguration von LEDs und Buttons
config system
option hostname 'jupiter.bablokb-local.de'
option timezone 'CET-1CEST,M3.5.0,M10.5.0/3'
config timeserver 'ntp'
list server '0.openwrt.pool.ntp.org'
list server '1.openwrt.pool.ntp.org'
list server '2.openwrt.pool.ntp.org'
list server '3.openwrt.pool.ntp.org'
option enable_server '0'
config led 'led_usb'
option name 'USB'
option sysfs 'tp-link:green:3g'
option trigger 'usbdev'
option dev '1-1'
option interval '50'
config led 'led_wlan'
option name 'WLAN'
option sysfs 'tp-link:green:wlan'
option trigger 'phy0tpt'
config led 'led_lan'
option name 'LAN'
option sysfs 'tp-link:green:lan'
option trigger 'netdev'
option dev 'eth0'
option mode 'link tx rx'
config led 'led_wps'
option name 'wps'
option sysfs 'tp-link:green:wps'
option trigger 'default-on'
config button
option button 'wps'
option action 'released'
option min '3'
option max '6'
option handler 'halt'
config button
option button 'wps'
option action 'released'
option min '0'
option max '2'
option handler 'logger wps pressed 0-2s'
config slider 'slider'
option handler '/usr/sbin/handle_slider'
Im Normalfall koppelt OpenWRT die LED-Aktivität an die Betriebszustände einzelner Komponenten, wie des Netzwerks oder der USB-Schnittstelle. Diese Vorgaben können Sie aber nach Ihren Wünschen frei anpassen.
Auch die Konfiguration der Schalter ist einfach. Zum einen müssen Sie das Event-System des Kernels so konfigurieren, dass er für die Buttons entsprechende Events auslöst. Hierzu editieren Sie die Datei /etc/hotplug2.rules und entfernen das Caret (das “Dach”) vor dem String ^Buttons. Da es sich hier um eine Ausnahmeliste handelt, aktivieren Sie durch das Entfernen die Events für die Buttons. Ab jetzt führt das System für jeden Button-Event alle Skripte im Verzeichnis /etc/hotplug.d/button aus. Dabei sind die Variablen BUTTON und ACTION gesetzt.
Ein Beispiel, das auch das Zusammenspiel mit den LEDs demonstriert, zeigt Listing 6. Dieses Skript wirkt nur für den WPS-Taster (Zeile 22) und sorgt dafür, dass die WPS-LED drei Sekunden blinkt (Zeilen 6 bis 8 und 10). Dann erlischt es für weitere drei Sekunden. Lassen Sie die Taste los, schaltet das Skript die LED wieder ein (Zeile 19).
Listing 6
#!/bin/sh
# Button-Events verarbeiten
set_led_blink() {
# Blinken einschalten (1s an / 0,2s aus)
echo timer > /sys/class/leds/tp-link\:green\:wps/trigger
echo 1000 > /sys/class/leds/tp-link\:green\:wps/delay_on
echo 200 > /sys/class/leds/tp-link\:green\:wps/delay_off
# nach drei Sekunden abschalten
sleep 3
echo none > /sys/class/leds/tp-link\:green\:wps/trigger
# nach drei Sekunden wieder anschalten
sleep 3
set_led_on
}
set_led_on() {
# LED anschalten
echo default-on > /sys/class/leds/tp-link\:green\:wps/trigger
}
if [ "$BUTTON" = "wps" ]; then
if [ "$ACTION" = "pressed" ]; then
set_led_blink &
else
set_led_on
fi
else
exit 0
fi
Anstatt jetzt jedes Skript einzeln im Button-Verzeichnis abzulegen und dort wie im Listing 5 den Status des Schalters abzufragen, lohnt es sich, ein generisches Button-Skript aus dem OpenWRT-Fundus [4] herunterzuladen. Danach konfigurieren Sie die Schalter ganz einfach analog zu den LEDs in /etc/config/system.
Dort ist der WPS-Button als Ausschalter konfiguriert: Lassen Sie ihn nach mindestens drei und maximal sechs Sekunden los, dann fährt das System herunter (Zeilen 37 bis 42 in Listing 5). Hier erschließt sich auch der Sinn des Programms aus Listing 6, denn die LED des Buttons blinkt während drei Sekunden und geht dann für drei Sekunden aus – Sie müssen also nicht mitzählen, um das System herunterzufahren.
Ebenso könnten Sie den WPS-Taster auch nutzen, um mit kurzen Klicks eine andere Aktion zu starten. Listing 5 konfiguriert hier in den Zeilen 44 bis 49 zu Demonstrationszwecken einen Log-Eintrag.
Der Schiebeschalter
Der Schiebeschalter des TL-MR3020 macht aus zwei Gründen etwas mehr Arbeit: Erstens sieht der Kernel im Schiebeschalter nicht einen, sondern zwei Buttons, denn um dessen drei Zustände abzubilden, braucht es zwei Bits. Jede Änderung des Schalters löst also zwei Events aus, die zwar sequenziell bei den Verarbeitungsskripts ankommen, aber gemeinsam ausgewertet werden müssen. Zweitens bekommt das Event-System nur Änderungen mit.
Um also beim Booten den Status des Schiebeschalters abzufragen – etwa zur Konfiguration der Netzwerkumgebung – gilt es ein kleines Skript zu bemühen. Dieser Aspekt ist im OpenWRT-Wiki jedoch nur andeutungsweise dokumentiert. Listing 7 zeigt, wie es geht: Das Skript hinterlegt den Status der beiden Buttons BTN_0 und BTN_1 in entsprechend benannten Dateien unter /var/run. Das Skript läuft zum Systemstart einmalig, gestartet aus /etc/rc.local.
Listing 7
#!/bin/sh # Auslesen des Sliders (aka BTN_0/BTN_1) # rmmod verwendet underscores, bei insmod sind es Striche! rmmod gpio_button_hotplug # Kernel-Modul entf. echo 18 > /sys/class/gpio/export # export BTN_0 echo 20 > /sys/class/gpio/export # export BTN_1 cat /sys/class/gpio/gpio18/value > /var/run/BTN_0 # Status BTN_0 cat /sys/class/gpio/gpio20/value > /var/run/BTN_1 # Status BTN_1 echo 18 > /sys/class/gpio/unexport # unexport BTN_0 echo 20 > /sys/class/gpio/unexport # unexport BTN_1 insmod gpio-button-hotplug # Kernel-Modul laden
Das Skript in Listing 8 dagegen läuft bei jedem Button-Event. Es aktualisiert den Button-Status im Verzeichnis /var/run. Zusätzlich startet es ein Verarbeitungsskript. Die zusätzliche Magie in den Zeilen 10 bis 12 sorgt dafür, dass nur ein Verarbeitungsskript anläuft. Die Wartezeit vor der Verarbeitung (Zeile 21) sorgt dafür, dass alle relevanten Button-Events auch eingetroffen und verarbeitet sind. Die Zeilen 16 und 17 holen das Verarbeitungsskript aus der Konfigurationsdatei /etc/config/system. Das Verarbeitungsskript startet dann in Zeile 22.
Listing 8
#!/bin/sh
# Events des Sliders verarbeiten
. /lib/functions.sh
DELAY=5
LOCK=/var/run/slider.lock
# --- Update ausführen (asynchron) ---
run_handler() {
# nur starten, falls nicht schon aktiv
if ! mkdir "$LOCK" 2>/dev/null; then
logger "update-script läuft schon"
exit 0
fi
# Verarbeitungsskript aus der /etc/config/system lesen
config_load system
config_get handler slider handler
logger "handler-script: $handler"
logger "warte $DELAY Sekunden auf alle Events"
sleep $DELAY
eval $handler # Handler ausführen
rm -fr "$LOCK"
}
# --- Hauptprogramm ------------------
logger "Verarbeite Event '$ACTION' für $BUTTON"
# WPS-Button ignorieren
if [ "$BUTTON" = "wps" ]; then
exit 0
fi
# Update Button-Datei gemäß Event
if [ "$ACTION" = "pressed" ]; then
echo "1" > "/var/run/$BUTTON"
else
echo "0" > "/var/run/$BUTTON"
fi
# asynchron ausführen
run_handler & # (Event-Verarbeitung nicht blockieren)
Ein Beispiel für ein solches Skript zeigt Listing 9. Es liest den Status des Schiebeschalters und konfiguriert das Netzwerk um. Die eigentlichen Netzwerkdateien liegen nur als symbolische Links vor; die Umkonfiguration besteht also darin, die Symlinks auf die neuen Konfigurationsdateien zu legen.
Dabei enthält zum Beispiel /etc/config/network.AP die Konfiguration für das Netzwerk, wenn der Slider auf AP steht. Sinnvollerweise starten Sie das Verarbeitungsskript auch einmal beim Systemstart (in /etc/rc.local, nach dem Auslesen des Slider-Status).
Listing 9
#!/bin/sh # Verarbeitungsskript für den Slider logger "Führe $0 aus" # Status des Sliders auslesen if [ `cat /var/run/BTN_0` = "0" ]; then slider="WISP" elif [ `cat /var/run/BTN_1` = "0" ]; then slider="3G" else slider="AP" fi logger "Status des Sliders: $slider" # Alte Symlinks entfernen rm /etc/config/dhcp rm /etc/config/network rm /etc/config/wireless # Neue Symlinks setzen ln -s dhcp.$slider /etc/config/dhcp ln -s network.$slider /etc/config/network ln -s wireless.$slider /etc/config/wireless # Netzwerk und DHCP neu starten /etc/init.d/network restart /etc/init.d/dnsmasq restart
Fazit
Damit ist die Hardware erklärt, Sie müssen “nur” die einzelnen Komponenten verbinden. Ausführliche Informationen dazu – etwa, um einen UMTS-Stick zum Laufen zu bringen oder für die Implementierung spezieller Netzwerkszenarien – finden Sie im OpenWRT-Wiki.
Der kleine Router kann nicht jeden Anwendungsfall abdecken. Aber die Mechanismen, die dieser Artikel beschreibt, gelten so oder zumindest ähnlich auch für andere Geräte, auch solche andere Hersteller. Am oberen Ende des Leistungsspektrums stehen dabei die QNAP-NAS-Geräte, die sogar nativ mit OpenWRT ins Haus kommen. Hier macht allerdings die Fülle der vorkonfigurierten Dienste eigene Anpassungen deutlich schwieriger.
Weitere Anwendungsbeispiele
Nützliche Anwendungsfälle für den TL-MR3020 ergeben sich aus seinem geringen Stromverbrauch und seiner Mobilität. Beim Autor dient der Rechner als Synchronisationsserver: Mithilfe der Android-App “Rsync for Android” gleicht er Daten zwischen seinen Mobilgeräten, dem Server und weiteren Rechnern ab. Der Clou dabei: Unterwegs dient der Server auch als Router und emuliert das Heimnetzwerk – eine Umkonfiguration des mobilen Zoos ist also nicht notwendig.
Weitere Anwendungsszenarien für den TL-MR3020 finden Sie im Internet über eine einfache Suche bei Google. Die Spanne reicht vom Webserver über VPN-Gateways bis hin zur einfachen Social-Network-Plattform. Um die Grenzen des Rechners zu erforschen, hat der Autor auch Owncloud auf dem TL-MR3020 installiert. Die Anwendung benötigt neben einem Webserver auch einen kompletten PHP-Stack.
Die Grundfunktionen wie Anzeige und Pflege des Kalenders funktionieren, wenn auch langsam. Jedoch stürzte der TL-MR3020 schon beim gleichzeitigen Hochladen mehrerer Bilder reproduzierbar ab. Womöglich ist hier durch geschicktes Tuning noch etwas mehr drin, doch um Owncloud wirklich ernsthaft zu betreiben, benötigt man etwas potentere Hardware.
Infos
[1] TP-Link: http://www.tp-link.com.de
[2] OpenWRT-Projekt: https://openwrt.org
[3] Details zum TL-MR3020: http://wiki.openwrt.org/toh/tp-link/tl-mr3020
[4] Generische Verarbeitung von Button-Events: https://dev.openwrt.org/browser/trunk/target/linux/atheros/base-files/etc/hotplug.d/button/00-button
Der Autor

Bernhard Bablok arbeitet bei der Allianz Managed&Operations Services SE als SAP-HR-Entwickler. Wenn er nicht Musik hört, mit dem Radl oder zu Fuß unterwegs ist, beschäftigt er sich mit Themen rund um Linux und Objektorientierung. Sie erreichen ihn unter mail@bablokb.de zu erreichen.




